
双方团队围绕“高精度点云数据实时智能处理”核心问题展开攻坚,实现: ✅ 效率跃升:复杂场景数据处理速度提升40%,为无人机在激光雷达场景提供更强算力支撑; ✅ 精度突破:基于深度模拟的噪声滤除模型,将数据误差率控制在0.05%以内。
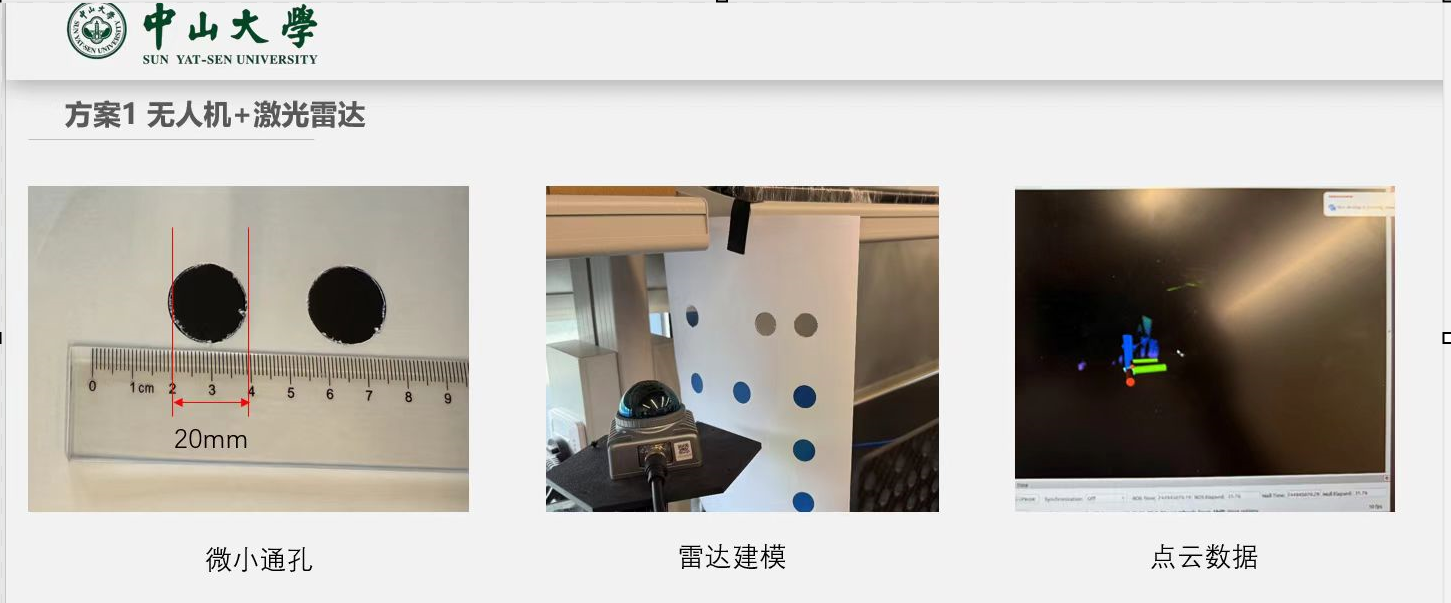
轻量化激光雷达点云AI处理引擎 是针对激光雷达(LiDAR)生成的三维点云数据,在资源受限环境(如车载计算单元、嵌入式设备或移动端)中高效运行的AI处理系统。其核心目标是通过优化算法、模型架构和硬件适配,实现低功耗、高实时性、小体积的点云处理能力,同时保持较高的感知精度。
激光的电场振动方向固定在一个平面内,形成线性偏振光。点云处理是一个涉及多个步骤和算法的复杂过程,从原始点云数据的获取到最终的三维模型构建。激光雷达通过模拟蒸发板反射信号,蒸发板可能用于模拟不同环境下的反射光信号,例如雾、雨、烟尘等低能见度条件,或高温蒸发环境(如路面热浪)。具体信号类型取决于测试目标,可能包括衰减/畸变的光脉冲、标定反射信号或多物理场耦合信号。如需更精确的回答,需进一步明确蒸发板的设计用途或应用场景。
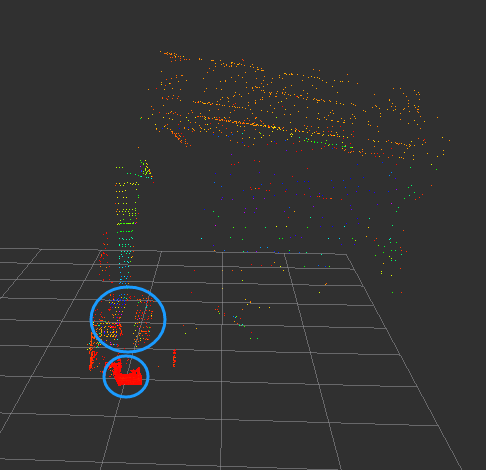
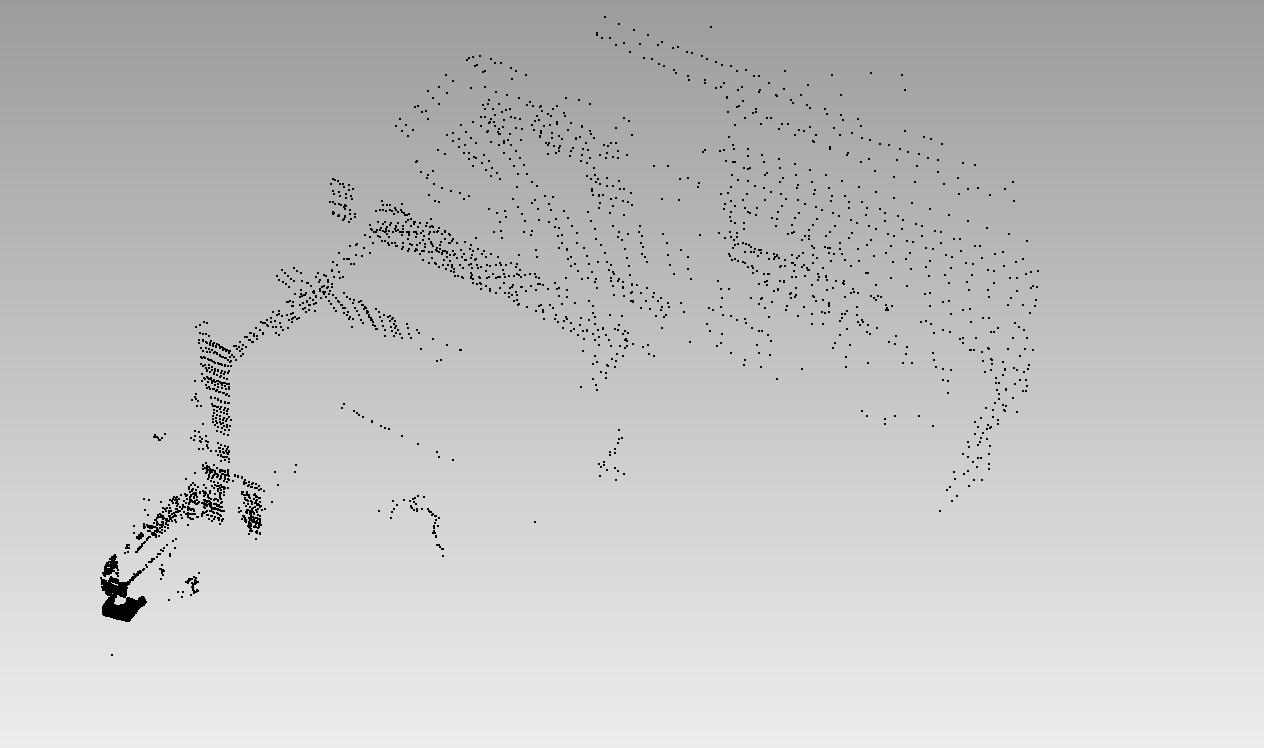
点云数据(Point Cloud Data) 是通过传感器(如激光雷达、3D扫描仪、深度相机等)采集的一种三维空间数据表示形式,由大量离散的点(Point)组成。每个点记录了其在三维空间中的坐标(X, Y, Z),还可能包含其他属性(如颜色、反射强度、时间戳等)。通过旋转或移动扫描头,逐点或逐面采集物体表面的三维数据。点云数据是三维世界的数字化骨架,通过离散点精确描述物体形状和空间关系,是三维感知与建模的核心数据形式。随着激光雷达和深度学习技术的进步,点云在自动驾驶、机器人、元宇宙等领域发挥着不可替代的作用。
总的来说,轻量化激光雷达点云AI处理引擎是推动三维感知技术落地的关键,需结合算法优化、硬件协同和场景适配。未来方向包括自适应性更强的动态压缩、类脑计算架构(如脉冲神经网络)以及端-云协同推理,以进一步突破资源限制。(图片来自网络,如有侵权,请联系删除)




